Методы определения координат в радиолокационных и радионавигационных системах УВД
Радиотехнические методы измерения дальности:
• Импульсные (временные)
• Фазовые
• Частотные
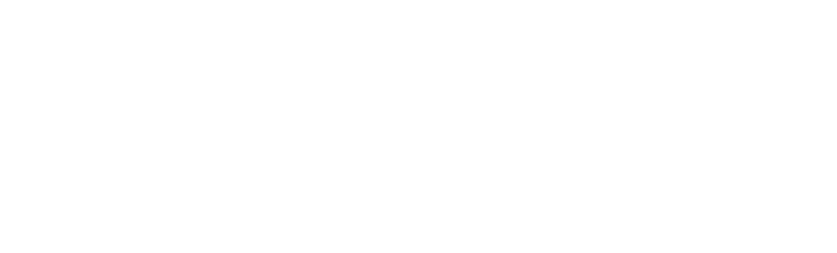
Импульсный метод измерения дальности
Зная время задержки между зондирующим и отраженным сигналом, можно определить дальность до объекта.
Схема развертки импульсного метода измерения дальности
Фазовый метод измерения дальности
Основывается на измерении разности фаз между опорным колебанием и принятым. Дальность будет определяться следующей формулой:
Такое возможно, если выполняется условия равенства частот и фаз опорного и принимаемого сигнала, что достигается за счет жесткой синхронизации задающего и опорного генератора.
Частотный метод измерения дальности
Дальность до объекта измеряется путем применения частотной модуляции излученного сигнала и оценки сдвига частоты между излучённым и принятым. Частотная модуляция — процесс изменения частоты несущего сигнала в соответствии с мгновенными значениями модулирующего сигнала.
Дальность определяется следующей формулой:
МЕТОДЫ ИЗМЕРЕНИЯ СКОРОСТИ
• На основе эффекта Доплера
• Корреляционный
Метод измерения скорости на основе эффекта Доплера
Измерение скорости достигается путём передачи ЧМ сигнала и измерения разницы в частоте между задержанным принятым и передаваемым сигналами.
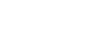
Корреляционный метод измерения скорости
Рассмотрим объект, движущийся параллельно поверхности Земли с вектором путевой скорости V, направление которого совпадает с продольной осью объекта.
На борту объекта вдоль продольной оси установлены на равном расстоянии друг от друга три антенны: А1 - излучающая и Аи А2 - приемные. Пусть расстояние между соседними антеннами равно d. Антенны смотрят вертикально вниз и высвечивают на поверхности участки S1, Su и S2 соответственно. Пересечение зон действия антенн вследствие движения ВС будет смещаться. Измеряя положение этого пересечения можно определеть скорость ВС.
Радионавигационные методы углометрии
• Одноканальные:
- Метод максимума
- Метод минимума
• Многоканальные:
- Фазовый метод
- Амплитудный метод
- Доплеровский метод
- Дифференциально-фазовый метод
Метод максимума
В момент времени tmax, когда направления максимума диаграммы направленности совпадает с направлением на ВС, амплитуда принимаемого сигнала достигает своего наибольшего значения.

Метод минимума
Диаграмма направленности антенны в этом случае имеет два лепестка с провалом между ними. Измерение угловой координаты ВС при реализации этого метода сводится к оценке положении во времени провала огибающей принятого сигнала.
Амплитудный равносигнальный метод
Метод основан на измерении угла наклона фазового фронта волны, приходящей в точку приёма. Это измерение происходит путем сравнения амплитуд сигналов, принятые двумя каналами, антенны которых имеют один фазовый центр, но разнесенные по угловой координате диаграммы направленности.
1) Разности логарифмов амплитуд E1 и E2


Фазовый метод
Метод основан на измерении угла наклона фазового фронта путем сравнения фаз сигналов, принятых в двух точках пространства. Измерив разность фаз, можно определить направление прихода волны.

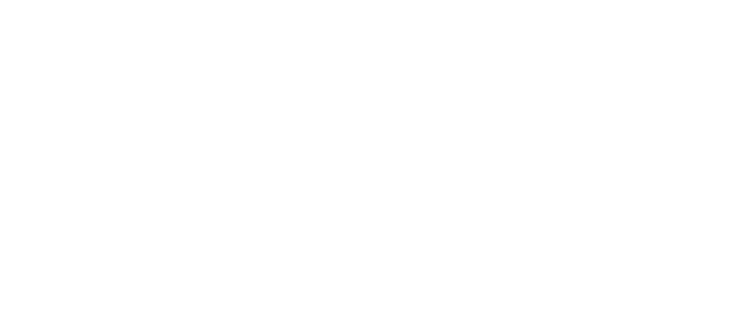
Доплеровский метод
Приемная систем пеленгаторов состоит из двух ненаправленных антенн: неподвижной, находящейся в начале системы координат и подвижной, вращающейся с некоторой угловой скоростью по окружности. Если на антенную систему падает волна, то разность фаз сигналов приемных каналов антенн будет определяться:

Дифференциально-фазовый метод
В качестве опорного сигнала для извлечения информации об угловой координате источника используется сигнал дополнительно вращающейся в том же направление антенны.
Тогда разность фаз будет определяться следующим выражением:

Позиционные способы определения местоположения
Основаны на использовании поверхности или линий положения ВС. Поверхности и линии положения представляют собой геометрическое место точек в пространстве, отвечающих условия постоянства параметров (дальность, угол места, азимут). Местоположение ВС определяется, как точка пересечения поверхностей положения.
Дальномерный метод
В данном случае измеряется расстояние от ВС до трех или более радионавигационных точек (РНТ). Местоположение ВС находится как точка пересечения сфер с центрами в радионавигационных точках.
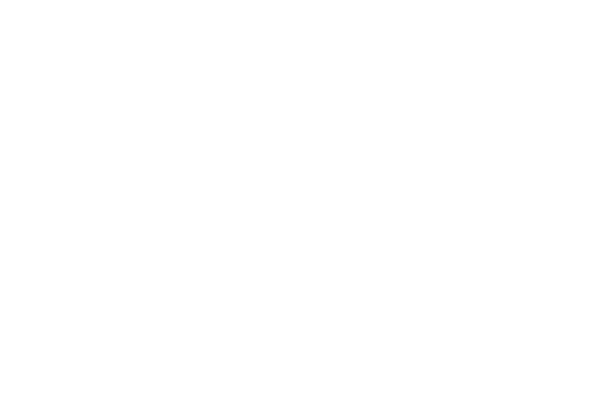
Разностно-дальномерный метод
При реализации данного способа имеется несколько РНТ, местоположение которых известно. Измерению подлежат разности расстояний между ВС и РНТ. Это достигается за счет синхронного излучения сигналов всеми РНТ одновременно. Причем одна РНТ является ведущей, а остальные – ведомые. Местоположение ВС определяется как точка пересечения соответствующих поверхностей положения – гиперболоидов.
Угломерный метод
При данном методе в РНТ измеряется азимут ВС. Местоположения ВС находится как точка пересечения плоскостей, соответствующих измеренным азимутам.
Дальномерно-угломерный метод
В данном методе используется одна РНТ, относительно которой измеряют дальность, азимут и угол места ВС. Начало системы координат находится в РНТ.
Метод счисления пути
Метод счисления пути предполагает измерение перемещения ВС относительно известного начального положения. Чтобы произвести счисление пути нужно располагать данными о курсе и скорости относительно Земли, т.е. о векторе путевой скорости. Вектор перемещения (вектор пройденного пути) определяется путём однократного интегрирования скорости.
Обзорно-сравнительный метод
Обзорно-сравнительный метод определения местонахождения ВС основан на сравнении изображения местности на карте с фактическим видом земной поверхности.